
| Test your knowledge |
|
|
Batch Normalization (BatchNorm) is a very frequently used technique in Deep Learning due to its power to not only enhance model performance but also reduce training time. However, the reason why it works remains a mystery to most of us. Furthermore, many tutorials and explanations on the Internet interpret it ambiguously, leaving readers with a false perception of the problem.
In this article, we attempt to give an introduction to BatchNorm, including what it is and why it works in the objective and up-to-date point of view.
Batch Normalization
BatchNorm was first proposed by Sergey and Christian in 2015. In their paper, the authors stated:
Batch Normalization allows us to use much higher learning rates and be less careful about initialization. It also acts as a regularizer, in some cases eliminating the need for Dropout.
which was then verified by many other researchers, building the popularity of BatchNorm.
Batch?
Deep Neural Networks are trained with Gradient Descent optimization, most commonly, the Stochastic Gradient Descent variant.
With Gradient Descent, the process operates in steps, with each step involves feeding data to the network. There are 3 standard strategies of inputting data:
To date, the Mini-Batch SGD is preferred in the Deep Learning community as it has some advantages over the other two:
Normalization?
Normalization is the process of bringing values to a standard form.
In the scope of Machine Learning, normalization often means returning the values to a distribution of 0-mean and unit variance.
Batch Normalization?
Batch Normalization is the act of applying normalizations to each batch of the Mini-Batch SGD. These normalizations are NOT just applied before giving the data to the network but may be applied at many layers of the network.
For a layer with d-dimensional input  , we apply normalization to each of the dimension separately. In other words,
, we apply normalization to each of the dimension separately. In other words,  is transformed independently from other dimensions. For readability, from now on, we will omit the
is transformed independently from other dimensions. For readability, from now on, we will omit the  in the nomination of .
in the nomination of .
Given that the input is a vector of size m ( ), with
), with  being the batch size. The BatchNorm is described as below:
being the batch size. The BatchNorm is described as below:
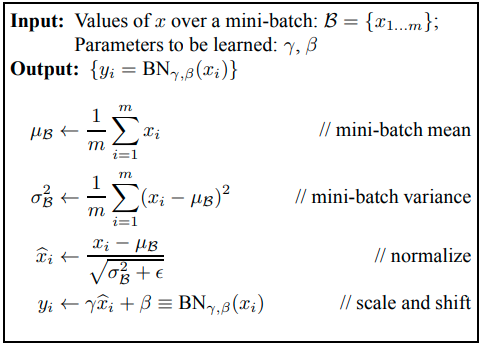
where:
 and
and  are 2 additional parameters for each dimension of the input. They are also learned along with the other parameters in the Back Propagation process. and , as outlined by the authors, attempt to restore the representation power of the networks, since simply transforming input data to a 0-mean unit-variance distribution may change what the layer represents (e.g. in Sigmoid nonlinearity, this transformation may limit the output to the linear regime).
are 2 additional parameters for each dimension of the input. They are also learned along with the other parameters in the Back Propagation process. and , as outlined by the authors, attempt to restore the representation power of the networks, since simply transforming input data to a 0-mean unit-variance distribution may change what the layer represents (e.g. in Sigmoid nonlinearity, this transformation may limit the output to the linear regime). is a small constant added for the numerical stability of the computation (i.e. cases when
is a small constant added for the numerical stability of the computation (i.e. cases when  equals 0).
equals 0).
The authors suggested that BatchNorm may be used either immediate-before or immediate-after the activation functions. In their experiments, BatchNorm is added right-before the nonlinearities. However, some other researchers found using BatchNorm after nonlinearities can produce better outputs. The same test even indicates that removing the scale-and-shift phase (using and ) may increase the model’s performance.
The benefits of using BatchNorm
As described in the paper, BatchNorm helps in both speed and accuracy. To be more specific, it:
Even though the effectiveness of BatchNorm is inarguable, some of the reasoning from the authors is not agreed by many other researchers. We will elaborate on this in the subsequent sections.
Good practices with BatchNorm
| Test your understanding |
|
|
Why does BatchNorm work?
The authors’ reasoning
Back Propagation (BackProp) is a powerful technique to train Neural Networks, however, it has the disadvantage of assuming all the previous layers are fixed when updating each specific layer. Put it differently, at each backward step, BackProp updates all layers simultaneously, moreover, the updating value of layer i-th assumes all previous layers (all layer j-th, with j < i), are fixed, which is not true as all the network is changing. The continuous change in the distribution of each layer’s input is called the Internal covariate shift (ICS).
While this assumption simplifies the learning problem and makes the BackProp works, it is always violated, making the optimization process sub-optimal.
A solution to this problem is to decrease the learning rate, which lessens the changes in weights, which, in turn, makes the assumption more valid. Nonetheless, small learning rates diminish the speed of training, thus do not contribute any good to the process.
Another means is to be careful with parameter initialization, which is the direction taken by many previous studies.
Batch Normalization is introduced to partly solve this problem. It “standardize” the input of each layer in term of mean and variance in order to keep the ICS low.
In short, it is mainly:
BatchNorm  Low ICS efficient learning
Low ICS efficient learning
A side-effect that also turned out to be good is that the noise generated through the process helps with regularization, enhancing the generalization ability of the networks.
The explanation of reducing ICS, however, is not concrete as there are some questions still remain unanswered:
- Since and are altered at each training step, the mean and variance of the input would also vary, so how do they keep the ICS low?
Researches are conducted to answer the above questions. For example, this paper from Johan et al. argues the success of BatchNorm can be explained without ICS.
Ian Goodfellow’s lecture
Ian Goodfellow is the creator of GAN (Generative Adversarial Network), author of Deep Learning Book, and is also one of the pioneers of Deep Learning.
In his lecture on Batch Normalization, Ian stated his view on the reason why it works: because and help control the higher-order statistics.
As the Gradient Descent algorithm uses only first-order statistics to compute the optimization updates, we are unable to track the higher-order terms, which becomes increasingly important as the networks getting deeper. A change in the weights of one layer does not only influence the immediate successive layer but also the further layers on the net. (This matter is already well-known in the community of Deep Learning. )
Alternatively, the effects of higher-order derivation can be thought of from the secondary-school-Physics point of view. In Physics, the velocity is the derivative of position, while the acceleration is the derivative of velocity (or says, acceleration is the second-order derivative of position). By knowing velocity, we can somehow estimate the value of the position after an amount of time. Nonetheless, if the amount of time is large, the acceleration may change the velocity in the meantime, making our estimation further inaccurate. Hence, we are forced to set a small time frame. In this example, the position is analogous for the weights, velocity for the first derivative, the time frame for the learning rate, and acceleration for the higher-order derivatives. As we only know the first derivative (velocity), we have to set a small learning rate (time frame) in order to have an accurate estimation without being affected too much by the higher-order derivatives (acceleration).
According to Ian, by using BatchNorm, the statistics of a layer are controlled by only two parameters and , which is much easier for the subsequent layers to adapt to, instead of all the complex sets of weights. Furthermore, by letting these 2 parameters be learned, the original distribution of the input can be recovered if necessary.
Ian’s point of view, although not related to ICS, still mostly agrees with the authors of BatchNorm.
However, this interpretation remains a hypothesis without solid evidence. The above-mentioned experiment from Ducha-Aiki is, in one way or another, opposite to Ian’s thought when showing that BatchNorm without and gives a stronger performance over the conventional one in his case.
Shibani et al.’s view
Shibani et al. published a paper with the name being literally “How Does Batch Normalization Help Optimization?“.
In their research, they suggested 4 crucial points:
- The key impact that BatchNorm has on the training process, as they stated, is to reparameterize the underlying optimization problem to make its landscape significantly more smooth. To be more specific, it improves the Lipschitzness of the loss function and also makes gradients of the loss more Lipschitz. These effects ensure more reliable and predictive gradients, enabling the use of larger learning rates and lower the sensitivity to hyperparameter choices.
On a side note, for a constant L, a function f is L-Lipschitz if for
for 
 . Function f is -Lipschitz if
. Function f is -Lipschitz if  for . (More characteristics of -Lipschitz can be found on the lecture notes from Rutgers university here and here.)
for . (More characteristics of -Lipschitz can be found on the lecture notes from Rutgers university here and here.)
The authors’ mathematical proof of the above statement is presented in their paper. - The standard normalization strategies (
 ) also give the same performance as BatchNorm. From the paper:
) also give the same performance as BatchNorm. From the paper:
“We study schemes that fix the first-order moment of the activations, as BatchNorm does, and then normalizes them by the average of their-norm (before shifting the mean), for p = 1, 2, ∞.”
and
“We observe that all the normalization strategies offer comparable performance to BatchNorm.”
On a side note regarding the normalization schemes, this paper from Elad et al. also provides an interesting insight (although not so related to our topic).
Conclusion
In this article, we have a discussion of Batch Normalization, what it is, how it works and the reasons that make up its reputation.
Sergey Ioffe and Christian Szegedy, the authors of BatchNorm, proposed a wonderful technique to boost both the performance and speed of Deep Neural Networks. However, as concurred by the majority, their reasoning about the work is obscure, leaving a lot of confusion and disagreements.
Recently, there are a number of researches attempting to demystify the mystery behind BatchNorm. One of them is from Shibani et al., who conducted an in-depth experiment, proving that ICS is un-correlated with BatchNorm’s success. Furthermore, they figured out the root cause that makes BatchNorm work, which is mainly from its ability to smoothen the optimization landscape by making the gradients of the loss more Lipschitz. To date, this seems to be the most plausible explanation provided being backed up by experiments and mathematical proofs.
References:
- Batch Normalization original paper: link
- A test of BatchNorm by Ducha-Aiki on Github: link
- Xiang Li et al.’s paper about Dropout and BatchNorm: link
- Ian Goodfellow’s lecture on BatchNorm: link
- Shibani et al.’s paper about how BatchNorm helps: link, discussion: link
- Johan et al.’s paper about Understanding BatchNorm: link
- Mlexplained’s post about BatchNorm: link
- Paperspace’s post about BatchNorm: link
- Rutgers university’s lecture on Lipschitz continuity: link and link
- Elad et al.’s paper about Norm in deep networks: link